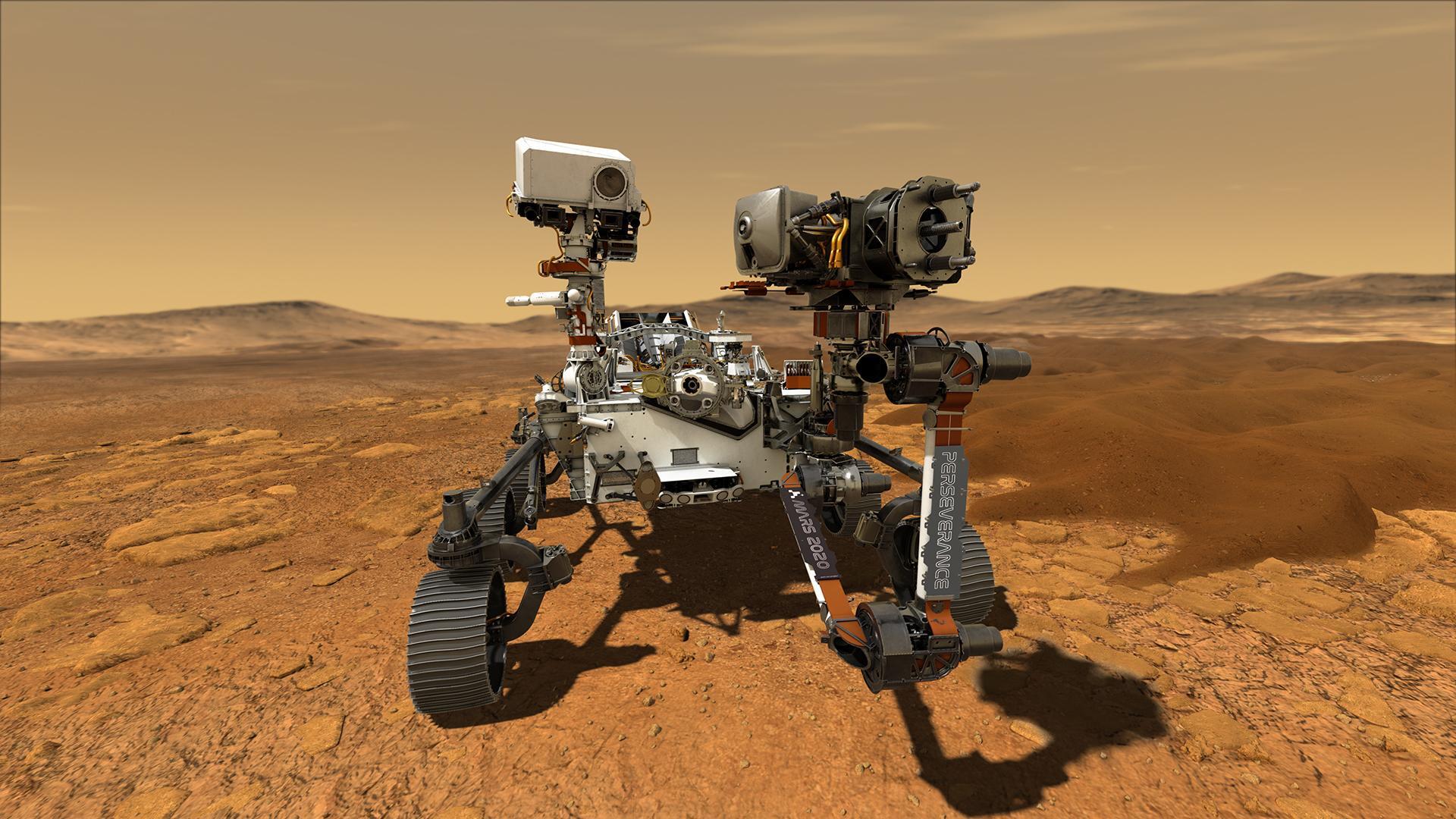
Уже совсем скоро состоится высадка очередного марсохода NASA под названием Perseverance на Красной планете. Накануне этого события в сети появилась запись, в которой инженер космического агентства раскрыл тонкости управления ровером.
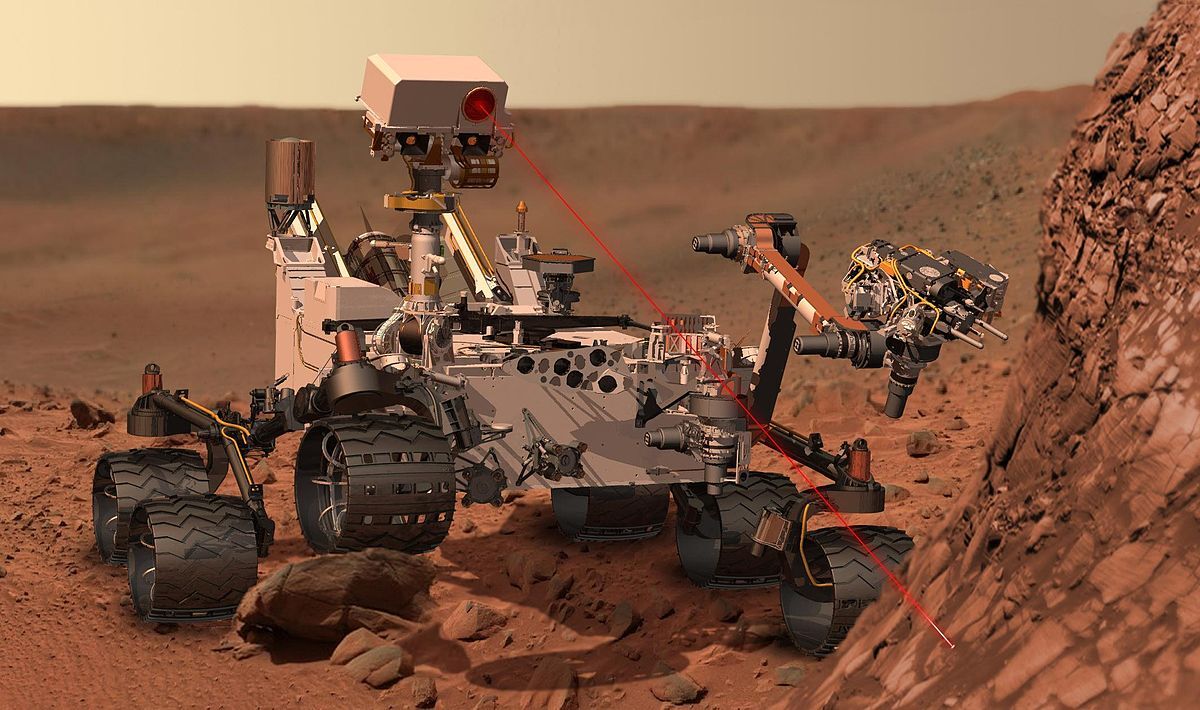
Эван Хильгеманн, присоединившийся в 2019 году к команде инженеров, отвечающих за управление шестиколёсного марсохода NASA Curiosity, рассказал, что «многие активности, которыми занимаются роверы, на самом деле жёстко заскриптованы и запланированы ещё заранее на Земле». При этом из-за большого пинга при общении с Землёй, многие решения касательно «экстренных» ситуаций, марсоход вынужден принимать самостоятельно.
Хильгеманн также отметил, что команда, управляющая ровером, имеет несколько способов управления им. Так, например, в режиме «слепого вождения» на устройство передаётся лишь список команд и инструкций, на основе которых он будет действовать.
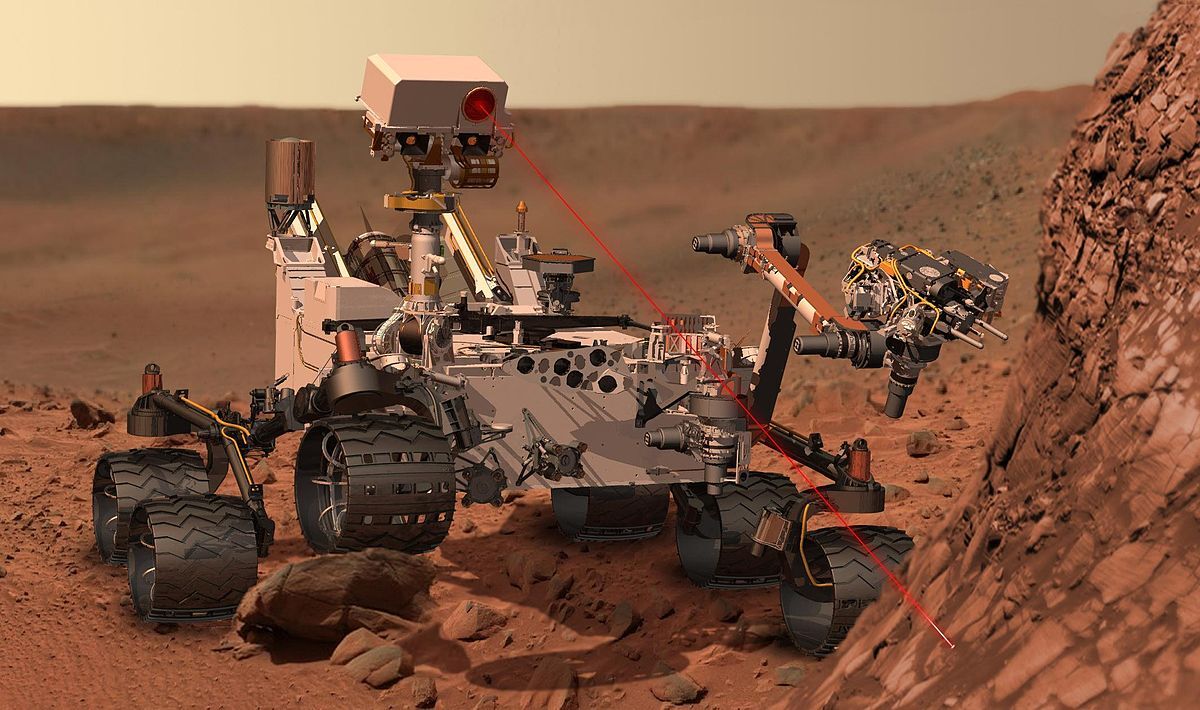
Также на руках у инженеров есть режим «визуальной одометрии». В нём марсоход передвигается и останавливается через каждый метр пути и делает свежую фотографию окружения для отправки данных на Землю. А уже на нашей планете компьютер принимает решение о безопасности дальнейшего движения по выбранному маршруту.решает — безопасно ли двигаться дальше по этому маршруту.
Но самым продвинутым можно назвать режим «автонавигации» или «автонав». В нём устройство способно передвигаться в полностью автономном режиме.